Tetik, dijital teknolojinin bir öğesidir, durumlardan birine geçen ve harici sinyaller kaldırıldığında bile süresiz olarak içinde kalabilen iki durumlu bir cihazdır. Birinci seviyenin mantıksal öğelerinden (AND-NOT, OR-NOT, vb.) oluşturulur ve ikinci seviyenin mantıksal cihazlarına aittir.
Pratikte, parmak arası terlikler ayrı bir pakette mikro devreler şeklinde üretilir veya büyük tümleşik devrelerde (LSI) veya programlanabilir mantık dizilerinde (PLM) elemanlar olarak bulunur.
İçerik
Tetik senkronizasyonunun sınıflandırılması ve türleri
Tetikleyiciler iki geniş sınıfa ayrılır:
- asenkron;
- senkron (saatli).
Aralarındaki temel fark, birinci kategori cihazlar için, çıkış sinyali seviyesinin girişteki (girişlerdeki) sinyaldeki değişiklikle aynı anda değişmesidir.Senkron tetikleyiciler için, yalnızca bunun için sağlanan girişte bir senkronizasyon (saat, flaş) sinyali varsa bir durum değişikliği meydana gelir. Bunun için C (saat) harfi ile gösterilen özel bir çıktı sağlanır. Geçitleme tipine göre senkron elemanlar iki sınıfa ayrılır:
- dinamik;
- statik.
İlk tip için, çıkış seviyesi, ön (ön kenar) veya saat darbesinin düşüşü (belirli tetik tipine bağlı olarak) sırasında giriş sinyallerinin konfigürasyonuna bağlı olarak değişir. Senkronize cephelerin (eğimler) görünümü arasında, girişlere herhangi bir sinyal uygulanabilir, tetik durumu değişmez. İkinci seçenekte, saatin işareti düzeyde bir değişiklik değil, Saat girişinde bir veya sıfırın varlığıdır. Ayrıca aşağıdakilere göre sınıflandırılan karmaşık tetikleme cihazları da vardır:
- kararlı durumların sayısı (ana elemanlar için 2'nin aksine 3 veya daha fazla);
- seviye sayısı (ayrıca 3'ten fazla);
- diğer özellikler.
Karmaşık öğeler belirli cihazlarda sınırlı kullanıma sahiptir.
Tetikleyici türleri ve nasıl çalıştıkları
Birkaç temel tetikleyici türü vardır. Farkları anlamadan önce, ortak bir özellik not edilmelidir: güç uygulandığında, herhangi bir cihazın çıkışı keyfi bir duruma ayarlanır. Bu, devrenin genel çalışması için kritik ise, devrelerin önceden ayarlanması sağlanmalıdır. En basit durumda, bu, başlangıç durumunu ayarlamak için bir sinyal üreten bir RC devresidir.
RS parmak arası terlik
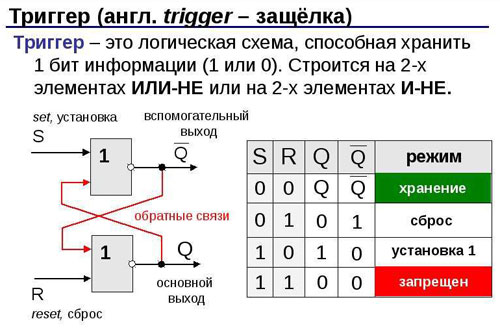
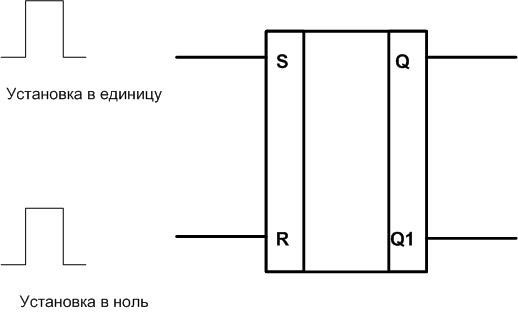
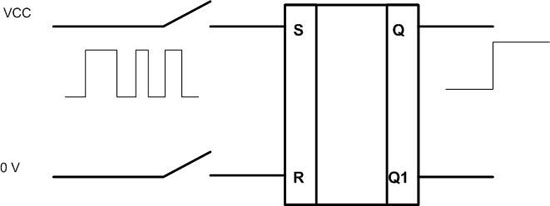
Asenkron iki durumlu aygıtın en yaygın türü RS flip-flop'tur. Ayrı durum 0 ve 1 ayarına sahip parmak arası terliklere atıfta bulunur.Bunun için iki giriş var:
- S - set (kurulum);
- R - sıfırla (sıfırla).
Doğrudan bir Q çıkışı vardır, ayrıca ters çevrilmiş bir Q1 çıkışı da olabilir. Üzerindeki mantık seviyesi her zaman Q'daki seviyenin tersidir - bu, devreleri tasarlarken kullanışlıdır.
S girişine pozitif bir seviye uygulandığında, Q çıkışı mantıksal bir birime ayarlanacaktır (ters çevrilmiş bir çıkış varsa, seviye 0'a gidecektir). Bundan sonra, kurulum girişinde sinyal istediğiniz gibi değişebilir - bu çıkış seviyesini etkilemez. R girişinde 1 görünene kadar. Bu, flip-flop'u 0 durumuna ayarlayacaktır (ters çevrilmiş çıkışta 1). Şimdi sıfırlama girişindeki sinyali değiştirmek, elemanın sonraki durumunu etkilemeyecektir.
Önemli! Her iki girişte de mantıksal bir birim olduğunda seçenek yasaktır. Tetik, keyfi bir duruma ayarlanacaktır. Şemalar tasarlanırken bu durumdan kaçınılmalıdır.
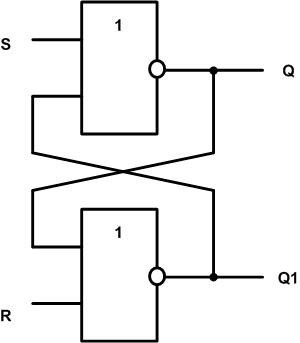
Bir RS flip-flop, yaygın olarak kullanılan iki girişli NAND öğeleri temelinde oluşturulabilir. Bu yöntem hem geleneksel mikro devrelerde hem de programlanabilir matrislerin içinde uygulanır.
Bir veya her iki giriş ters çevrilebilir. Bu, bu pimlerde tetikleyicinin yüksek değil, düşük bir seviye görünümüyle kontrol edildiği anlamına gelir.
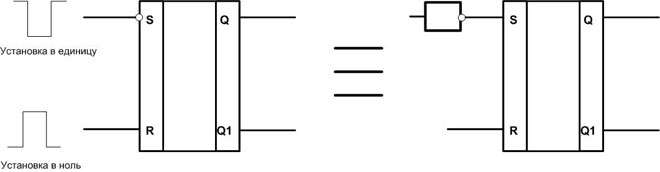
İki girişli VE-DEĞİL öğeleri üzerinde bir RS flip-flop oluşturursanız, her iki giriş de ters olacaktır - mantıksal bir sıfırın sağlanmasıyla kontrol edilir.
RS flip-flop'un kapılı bir versiyonu var. Ek bir C girişi vardır. Anahtarlama, iki koşul karşılandığında gerçekleşir:
- Set veya Reset girişinde yüksek bir seviyenin varlığı;
- bir saat sinyalinin varlığı.
Böyle bir eleman, örneğin geçişlerin sona ermesi sırasında, anahtarlamanın geciktirilmesi gereken durumlarda kullanılır.
D parmak arası terlik
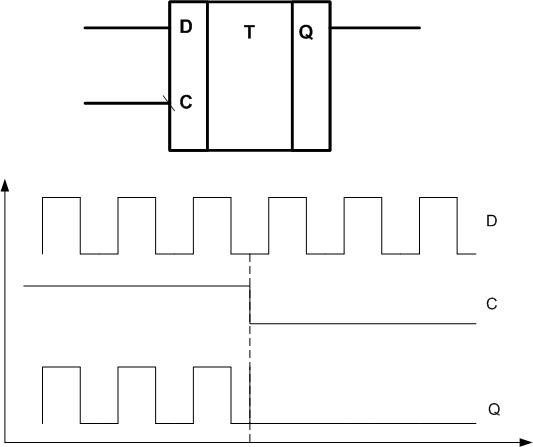
D-tetikleyici ("şeffaf tetik", "mandal", mandal), C girişi tarafından saatlenen senkron cihazlar kategorisine aittir. Ayrıca bir veri girişi D (Veri) vardır. İşlevsellik açısından, cihaz, tek bir giriş üzerinden bilgi alınmasıyla tetikleyicilere aittir.
Saat girişinde mantıksal bir tane olduğu sürece, Q çıkışındaki sinyal, veri girişindeki (saydamlık modu) sinyali tekrarlar. Flaş seviyesi 0 durumuna geçer geçmez, Q çıkışındaki seviye kenar (mandallar) zamanındaki ile aynı kalacaktır. Böylece girişteki giriş seviyesini istediğiniz zaman sabitleyebilirsiniz. Önde saat ayarlı D parmak arası terlikler de vardır. Sinyali flaşın pozitif kenarında kilitlerler.
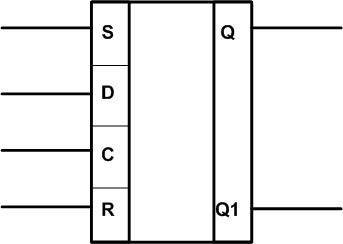
Pratikte, tek bir mikro devrede iki tip bistable cihaz birleştirilebilir. Örneğin, D ve RS parmak arası terlik. Bu durumda Set/Reset girişlerinin önceliği vardır. Üzerinde mantıksal bir sıfır varsa, öğe normal bir D-flip-flop gibi davranır. En az bir girişte yüksek bir seviye oluştuğunda, C ve D girişlerindeki sinyallerden bağımsız olarak çıkış 0 veya 1'e ayarlanır.
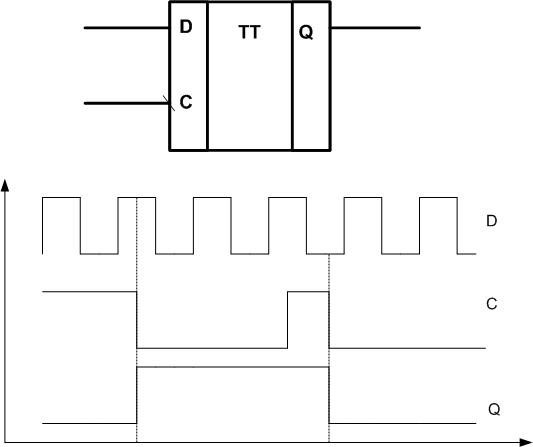
D parmak arası terliklerin şeffaflığı her zaman kullanışlı bir özellik değildir. Bunu önlemek için çift elemanlar kullanılır (flip-flop, "alkış" tetikleyici), bunlar TT harfleriyle gösterilir. İlk tetikleyici, giriş sinyalini çıkışa ileten normal bir mandaldır. İkinci tetikleyici bir bellek öğesi görevi görür. Her iki cihaz da bir flaş ile saatlidir.
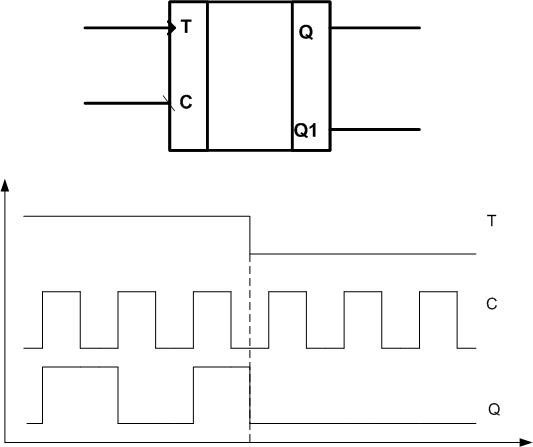
T parmak arası terlik
T tetikleyici, sayılabilir iki durumlu öğeler sınıfına aittir. İşin mantığı basittir - bir sonraki mantıksal birim girdisine her geldiğinde durumunu değiştirir.Girişe bir darbe sinyali uygulanırsa, çıkış frekansı girişin iki katı olacaktır. Tersine çevrilmiş çıkışta, sinyal doğrudan olanla faz dışı olacaktır.
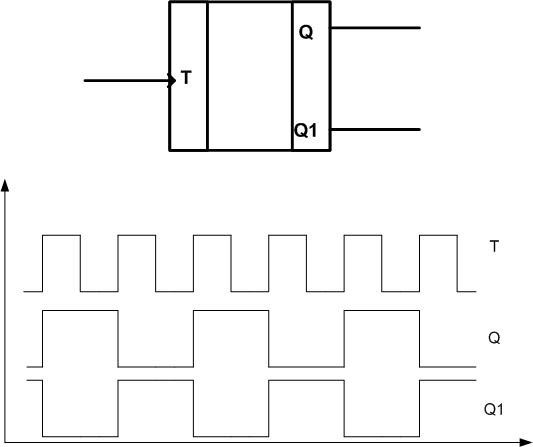
Asenkron bir T-flip-flop böyle çalışır. Senkron seçeneği de var. Saat girişine bir darbe sinyali uygulandığında ve T çıkışında mantıksal bir birimin varlığında, eleman asenkron olanla aynı şekilde davranır - giriş frekansını yarıya böler. T pini mantık sıfır ise, o zaman flaşların varlığından bağımsız olarak Q çıkışı düşük olarak ayarlanır.
 JK parmak arası terlik
JK parmak arası terlik
Bu iki durumlu öğe, evrensel olanlar kategorisine aittir. Girişler ile ayrı ayrı kontrol edilebilir. JK flip-flop'un mantığı, RS öğesinin çalışmasına benzer. J (İş) girişi, çıkışı bire ayarlamak için kullanılır. K (Keep) pinindeki yüksek bir seviye, çıkışı sıfıra sıfırlar. RS tetikleyicisinden temel farkı, iki kontrol girişinde aynı anda görünenlerin yasak olmamasıdır. Bu durumda, elemanın çıktısı durumunu tersine değiştirir.
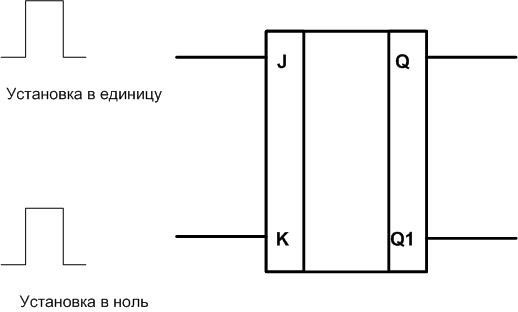
Job ve Keep çıkışları bağlıysa, JK-flip-flop, asenkron bir sayma T-flip-flop'a dönüşür. Birleşik girişe bir kare dalga uygulandığında, çıkış frekansın yarısı olacaktır. RS öğesi gibi, JK flip-flop'un saatli bir versiyonu vardır. Uygulamada, esas olarak bu tip kapılı elemanlar kullanılır.
Pratik kullanım
Tetikleyicilerin, kaydedilen bilgileri harici sinyaller kaldırıldığında bile tutma özelliği, bunların 1 bit kapasiteli bellek hücreleri olarak kullanılmasına olanak tanır.Tek öğelerden ikili durumları depolamak için bir matris oluşturabilirsiniz - bu prensibe göre statik rastgele erişimli bellekler (SRAM) oluşturulur. Bu tür belleğin bir özelliği, ek denetleyiciler gerektirmeyen basit bir devredir. Bu nedenle, bu tür SRAM'ler kontrolörlerde ve PLA'larda kullanılır. Ancak düşük kayıt yoğunluğu, bu tür matrislerin PC'lerde ve diğer güçlü bilgi işlem sistemlerinde kullanılmasını engeller.
Parmak arası terliklerin frekans bölücü olarak kullanımı yukarıda belirtilmiştir. Bistable elemanlar zincirler halinde bağlanabilir ve farklı bölme oranları elde edilebilir. Aynı dizi darbe sayacı olarak kullanılabilir. Bunu yapmak için, her an ara elemanlardan gelen çıktıların durumunu okumak gerekir - ilk elemanın girişine gelen darbelerin sayısına karşılık gelen bir ikili kod elde edilecektir.
Uygulanan tetikleyicilerin türüne bağlı olarak sayaçlar senkron veya asenkron olabilir. Seriden paralele dönüştürücüler aynı prensip üzerine inşa edilmiştir, ancak burada sadece kapılı elemanlar kullanılır. Ayrıca, dijital gecikme hatları ve ikili teknolojinin diğer öğeleri tetikleyiciler üzerine kuruludur.
RS parmak arası terlikler, seviye kıskaçları (sekme önleyiciler) olarak kullanılır. Mantıksal seviye kaynakları olarak mekanik anahtarlar (düğmeler, anahtarlar) kullanılıyorsa, basıldığında, sekme efekti bir yerine birçok sinyal oluşturacaktır. RS parmak arası terlik bununla başarılı bir şekilde savaşır.
İki durumlu cihazların kapsamı geniştir. Yardımlarıyla çözülen görev yelpazesi, özellikle standart dışı çözümler alanında, büyük ölçüde tasarımcının hayal gücüne bağlıdır.
Benzer makaleler: